Snapshot Localization Algorithms
![]()
These tutorials demonstrate the snapshot localization algorithms available in gnss_lib_py.
Weighted Least Squares
[1]:
import gnss_lib_py as glp
[2]:
# load Android Google Challenge data
glp.make_dir("../data")
!wget https://raw.githubusercontent.com/Stanford-NavLab/gnss_lib_py/main/data/unit_test/google_decimeter_2021/Pixel4XL_derived.csv --quiet -nc -O "../data/Pixel4XL_derived.csv"
derived_data = glp.AndroidDerived2021("../data/Pixel4XL_derived.csv", remove_timing_outliers=False)
Solve for the Weighted Least Squares position estimate simply by passing the measurement data.
When obtaining WLS estimates for real measurements, the rotation of the Earth between the signal transmission and reception has to be accounted for. solve_wls accounts for this by default and rotates the given SV positions into the ECEF frame of reference when the signals were received rather using the ECEF frame of reference of when the signals were transmitted.
If you assume that the satellite positions are given in the ECEF frame of reference when the signals were received (and not transmitted), set the parameter sv_rx_time = True in the function call.
[3]:
state_wls = glp.solve_wls(derived_data)
# When assuming that SV positions are given in the ECEF frame when signals are received use
# state_wls = glp.solve_wls(derived_data, sv_rx_time=True)
Plot the ECEF x and ECEF y computed position estimate of the receiver
[4]:
glp.plot_map(state_wls)
Custom Weighting Schemes for WLS
You can utilize custom weights for each measurement by passing in a row name into the weight_type parameter.
[5]:
# Morton, Y. Jade, et al., eds. Position, navigation, and timing technologies in
# the 21st century: Integrated satellite navigation, sensor systems, and civil
# applications, volume 1. John Wiley & Sons, 2021. Section 11.3.1.
derived_data["weights"] = 1./derived_data["raw_pr_sigma_m"]**2
state_wls_sigma = glp.solve_wls(derived_data,weight_type="weights")
state_wls_sigma.rename({"lat_rx_wls_deg":"lat_rx_" + "sigma" + "_deg",
"lon_rx_wls_deg":"lon_rx_" + "sigma" + "_deg",
"alt_rx_wls_m":"alt_rx_" + "sigma" + "_m",
}, inplace=True)
[6]:
glp.plot_map(state_wls, state_wls_sigma)
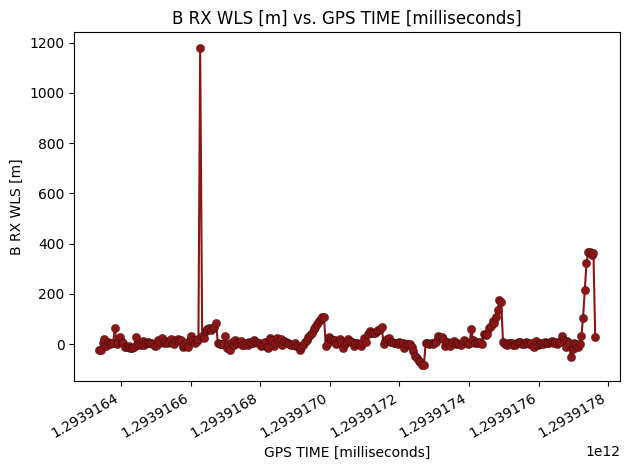
Estimating Only Receiver Clock Bias with WLS
If you only need to estimate the receiver clock bias, you can set the only_bias parameter to True and pass in the receiver position in with the receiver_state parameter.
[7]:
state_with_clock_bias = glp.solve_wls(derived_data, only_bias=True, receiver_state=state_wls)
[8]:
fig = glp.plot_metric(state_with_clock_bias,"gps_millis","b_rx_wls_m")